Andrew Panasyuk Mechatronics Engineer
Mars Rover Drive System
Capstone Project, 2019
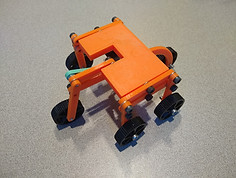
I created this rover suspension for the Northeastern University Rover Challenge team for Capstone with several other MechEs.
We built this design according to requirements from the URC team including size, cost, and maneuverability. The suspension we created won the Most Technically Complete first place prize for Capstone.
We selected the ORF-L linkage design with a swerve drive after comparing several suspension architectures with a decision matrix. I programmed a MATLAB genetic algorithm to optimally define 19 degrees of freedom in the suspension, designed an electronics/ controls subsystem, and supported wheel shape optimization.
I worked on this project with Noah Daviero, Matthew Dottinger, Samuel Penney, and Christian Wells, advised by Prof. Abhishek Kumar.
Our drive test video! Matt and I take the rover for a spin. Audio starts at 21s.

A sample output of the genetic algorithm.
Highlight 1 - MATLAB Genetic Algorithm
The chosen suspension design has 11 defining points, 3 of which hold wheels that touch the ground. The suspension will function for many combinations of points. That's 19 arbitrary, independent degrees of freedom! How will we decide on the optimal points?
I solved this problem by writing a genetic algorithm from scratch in MATLAB to generate an optimized suspension by evolving millions of seeds designs along a fitness gradient.
Each suspension was assigned a fitness based on its performance in 13 different wheel height configurations. This fitness value accounted for the following: Uniformity of ground contact force, wheel interference avoidance, singularity avoidance, minimum linkage length, and maximum linkage tensile/compressive forces.
A noise function was applied to each point of the best result of a particular generation to create the next generations of designs. After evolving hundreds of generations of designs, an optimal solution was found and used to define the suspension geometry.
Highlight 2 - Electronics and Software
I created the electronics and controls subsystems of the rover to allow us to drive and test the suspension. I used an Arduino with a PlayStation 2 controller library for user remote control, and programmed stepper and DC motor driver controls.

A video of simultaneous drive and swerve controls.
Electronics subsystem atop the rover body
Algodoo simulations of some suspension motions. ORF-L, our selected suspension, is bottom left.
Highlight 3 - Prototype Evaluation
I came up with a variety of methods for the team to compare suspension design options.
I used Algodoo, a secret gem of a physics simulation game, to provide an intuitive understanding of how a suspension would drive over terrain, as well as printing miniature suspension prototypes.



I printed this troupe of mini prototypes to help our intuitive understanding of the motion. L-R: Rocker-Bogie, OF-L, ORF-L, "Shrimp"